
La Universidad de Málaga colaborará con la ESA en un proyecto de robótica espacial
La Universidad de Málaga (UMA) ha acordado con la Agencia Espacial Europea (ESA) que investigadores del Departamento de Ingeniería de Sistemas y Automática colaborarán con la Agencia en el desarrollo de algoritmos para la planificación de caminos en vehículos de exploración planetaria (rovers).
La aportación de la UMA consiste en realizar un estudio sobre la aplicación de diferentes algoritmos de planificación de caminos, teniendo en cuenta diferentes parámetros. La investigación será llevada a cabo por profesores de este departamento y por un estudiante de Doctorado.
El acuerdo suscrito por la UMA y la ESA establece 15 meses para la duración del trabajo, que se ha iniciado en octubre. El estudiante de Doctorado investigará seis meses en Málaga y nueve en Holanda, sede de la Agencia Espacial Europea.
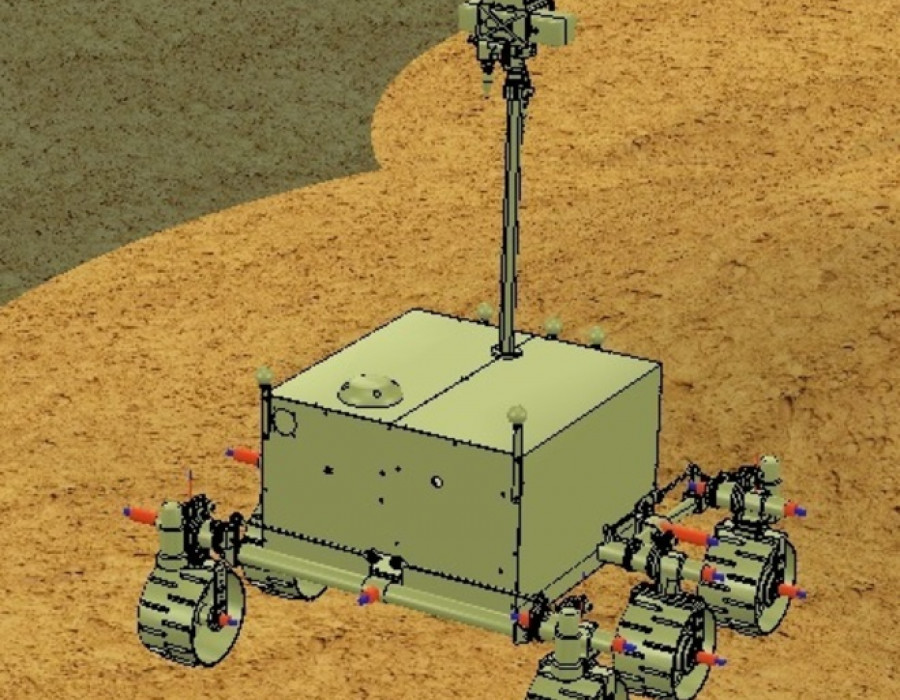
En la actualidad la ESA trabaja en el desarrollo de la tecnología necesaria que le permita llevar un vehículo a otro planeta y que éste sea capaz de desplazarse evitando los obstáculos que pueda encontrarse.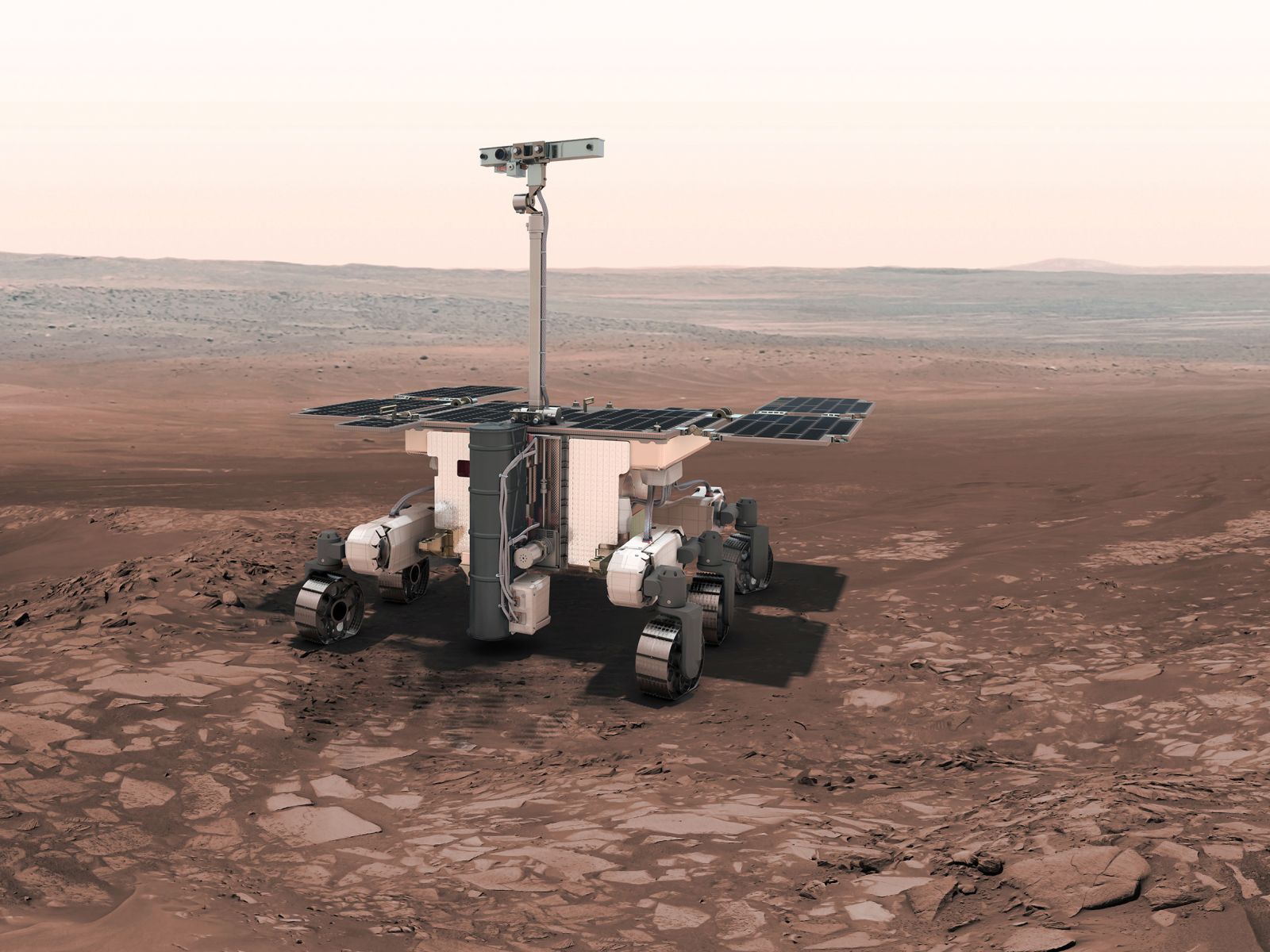
En este contexto, el investigador principal de este proyecto, el profesor Carlos Pérez del Pulgar, afirma que uno de los principales problemas es que el vehículo pueda quedar atrapado en terrenos rocosos, dunas o similares de los que no pueda salir.
Para solucionar este problema entra en juego la aplicación de algoritmos que permitan planificar el recorrido que el vehículo debe realizar desde un punto a otro, sorteando los obstáculos y optimizando ciertos parámetros como el consumo eléctrico o la exposición del rover a la radiación solar.
En particular, la misión Exomars de la ESA pretende colocar un rover en terreno marciano en el año 2020. Este vehículo estará dotado de un taladro que permitirá analizar el subsuelo de Marte en busca de vida extraterrestre, algo que no se ha realizado aún.
Fotografías: UMA/ESA



